Linear maps describe local behavior of nonlinear systems. Near a fixed point, any smooth map looks linear. The Jacobian matrix(the derivative of a nonlinear map) is exactly this linear approximation. So understanding how linear maps behave (sinks, sources, saddles) directly tells us how a nonlinear system behaves near its fixed points.
This is the bridge between linear and nonlinear dynamics.
Linear Map Behavior
We are continuing from the previous lecture on Linear Maps. The key insight: eigenvalues determine everything. They tell us whether a region shrinks, expands, or does both (saddle):
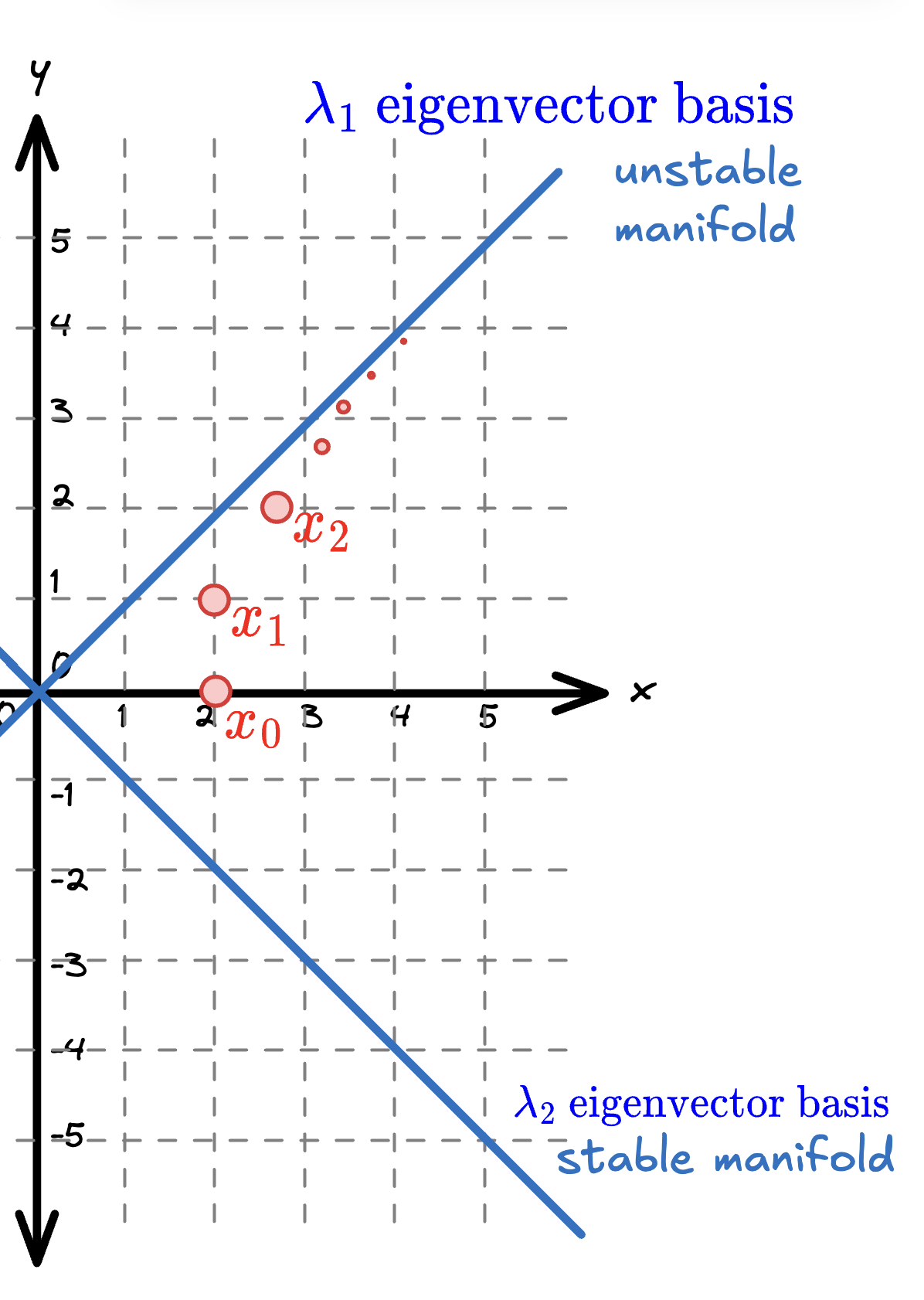
Starting from , successive iterations climb along the eigenvector direction (unstable manifold). Since , points expand along this direction. The eigenvector basis forms the stable manifold - points on this line contract toward the origin since .
The Hénon Map has two fixed points where we can compute these eigendirections:
Classification of Linear Maps
Linear maps on come in three flavors (up to a change of coordinates to eigenvector basis). The eigenvalues determine which type, and we’ll see that each type produces fundamentally different dynamics:
Type 1: Distinct Real Eigenvalues
The matrix is diagonal in eigenvector coordinates. Different eigenvalues mean different expansion rates in different directions, this is how saddles are born.
Maps the unit disc to an ellipse with semi-major axes of length (x-axis) and (y-axis). Behavior depends on the magnitudes:
- If : ellipse shrinks → sink
- If : ellipse expands → source
- If or vice versa: ellipse stretches in one direction, contracts in another → saddle
Type 2: Repeated Real Eigenvalues
Both eigenvalues are identical, so there’s no direction to expand while another contracts. No saddles here, as saddles require competing eigenvalues with different magnitudes.
Type 3: Complex Eigenvalues
Complex eigenvalues come in conjugate pairs with equal magnitude . We can factor this as:
where . This means rotates points by angle and scales them by factor .
no saddle, rotation + uniform scaling together means no stretching in one direction while contracting in another.
Theorem
Linearizing Nonlinear Maps: The Jacobian
But most dynamical systems are nonlinear. The Hénon Map is nonlinear: . How do we use our eigenvalue theory here?
Near a fixed point , a nonlinear map behaves like a linear map. The matrix that captures this linear behavior is the Jacobian matrix, matrix of partial derivatives.
Computing the Jacobian
Let be a map on and let . The Jacobian matrix of at , denoted is given by the matrix of Partial Derivatives of evaluated at .
Example
Henon Map
Why Does This Work?
We will look at uses of the Taylor Series next class, heres a snippet