Karl Sims
Pioneer of evolving 3d morphology on a computer.
Body Construction
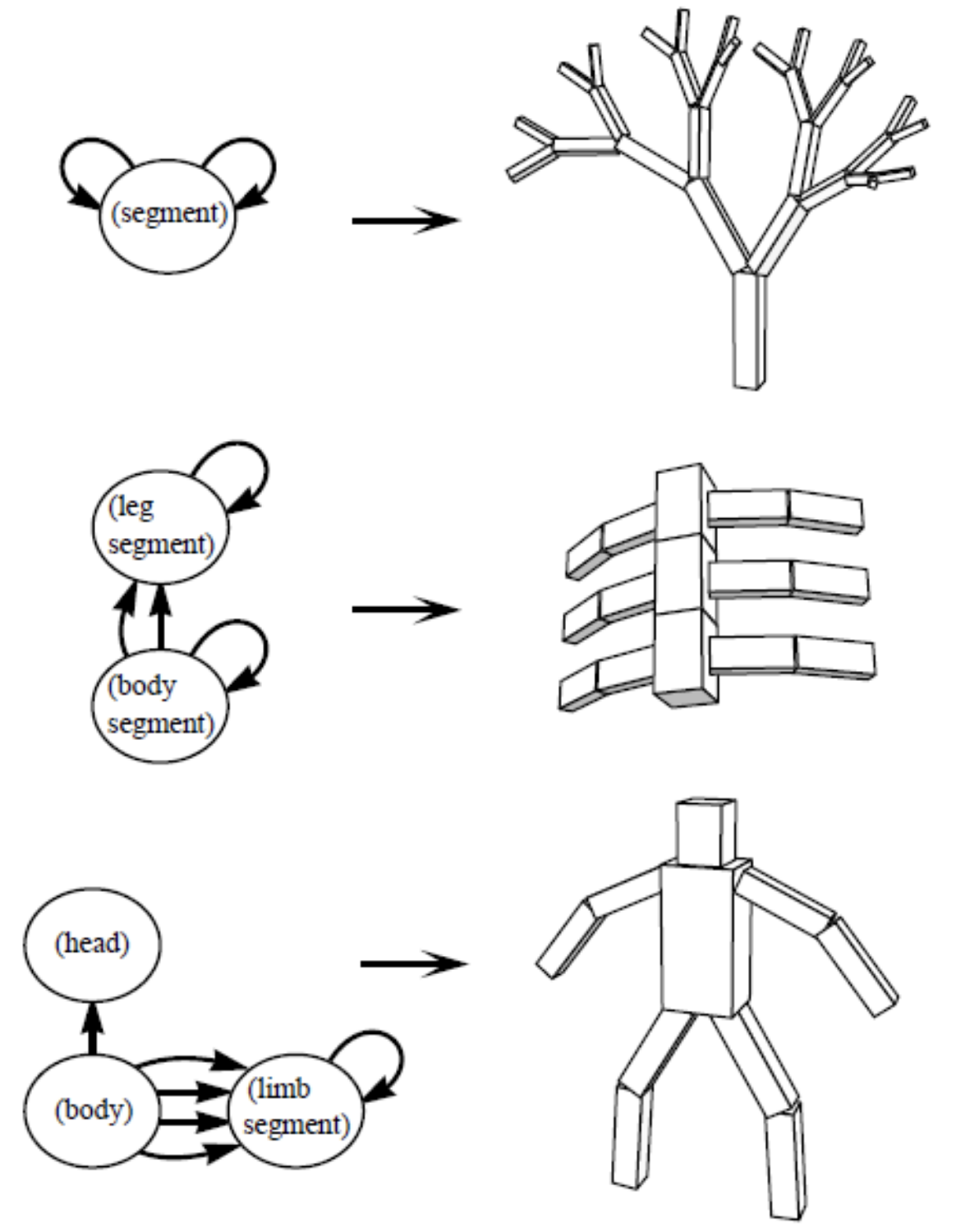
The trick presented here is to use recursion to contruct rigid morphologies.
Genotypes: nested, directed multigraphs.
would look something like the following pseudocode.
Node labels:
body part dimensions
joint-type: hinge, ball/socket…
joint-limits
recursive-limit (RL):
if ( RL>0 ):
RL = RL-1
follow all outgoing edges.
Edge labels:
change in position
change in orientation
change in scale
reflection
terminal-only flag (TO):
if ( TO==true &&
parent->RL==0 ):
follow edge;
Phenotypes: Simulated robots.
Brain Construction
Using Soft Robots for Rescue
imagine in the event of a natural disaster where methods for delivering water to humans might be necessary, but also difficult.
Phototaxis: movement of an agent/organism toward or away from light source.
Thermotaxis: similar, except governed by temperature gradients
Ideal would be to create a braitenburg vehciel that synthesizes the information from all the sources in an intelligent way for optimal human-seeking behavior.
Returning to the “evil starfish” from Resilient Machines Project
What if we put the agent in a circumstance where it is cut in half or damaged in the simulation. What would that look like? How would soft robots learn to locomote under injury?
Fractal Robots
reminds us of chaos theory!
Idea: self similarity for robots, not only on morphology but also itsoo
Evolve small CPPNs alone, then evolve the fractal-ish collection of small CPPNs as one robot. Dual evolution objective; good alone and good together.