Think of the task: several objects are placed in front of you. YOu must separate the round from edged objects while wearing a blindfold. How would you interact with the objects?
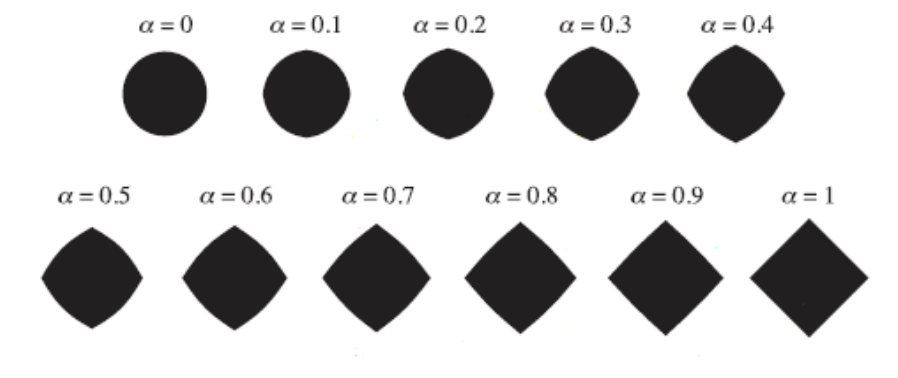
Active Categorical Perception
The ability of an animal or robot to interact with objects of interest to gather sensorimotor data sufficient to categorize them, where the movement itself is the perceptual act.
For a CTRNN
A CTRNN-controlled agent is evolved to perform active categorical perception on objects it cannot directly “see”, it must develop a motor strategy that produces informative sensory signals. The evolved behavior often looks like poking or circling, generating a sequence of sensor readings that encodes object geometry.
Builds directly on the self/nonself discrimination work from Minimal Cognition: the arm experiment already required the agent to move to learn; ACP scales this to objects external to the agent’s body.
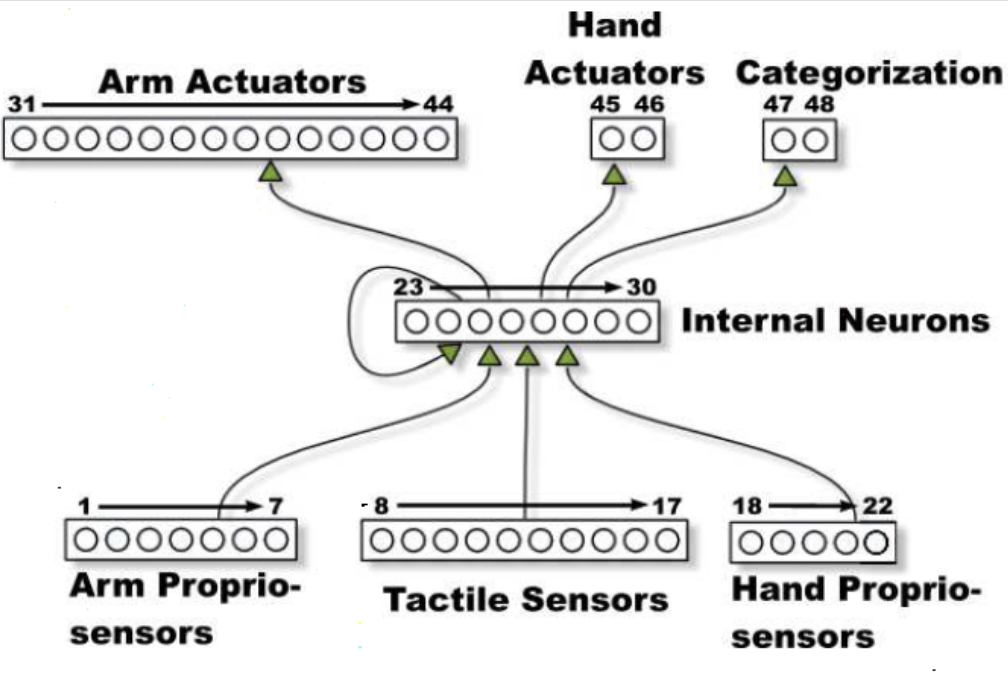
Why 14() motor neurons, but only 7 joints? Why two different forms for ? What does the mean?
Mental representations of spheres and ellipsoids:
In each trial , the agent represents the experienced object (i.e. the sphere or the ellipsoid ) by associating it to a rectangle or whose vertices are:
Bottom left vertex:
Top right vertex:
The sphere category, referred to as , corresponds to the minimum bounding box of all ; the ellipsoid category, referred to as , corresponds to the minimum bounding box of all .
Fitness Function
For fitness function , why are there two fitness terms and ? What does stand for? What does stand for
?
with the euclidean distance between the object sand the center of the palm at the end of the trial ; the maximum distance between the palm and the object when located on the table.